Arduino, Internet das Coisas e Computação vestível
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
|
[Voltar] |
[Avançar] |
Sensor Flexível de Força/Resistência
Descrição
Película Fina com sensor de força e resistência. O sensor é elaborado com materiais de nanômetro flexível altamente sensíveis que podem detectar pressões externas muito baixas. Possui alta sensibilidade e longa vida útil. As principais aplicações são: casa inteligente e eletrônica médica. Quando o sensor detecta pressão externa, a resistência muda. O sinal de pressão pode ser convertido em uma saída de sinal elétrico em uma faixa de cerca de ~ 10K a ~ 35K, o que significa que ele não nos dará uma faixa completa de 0-3.3 Volts (valor analógico 0-1023). O valor analógico esperado para o intervalo é entre 0 a 600.
Especificações
- Modelo: ZD10-100
- Comprimento: 100 mm / 3,9 pol
- Largura: 10 mm / 0,4 pol
- Alcance: 0~500g
- Espessura: 0,25 mm
- Ponto de resposta: menos de 20 g
- Tensão de ensaio: 3.3V
- Durabilidade: 1 milhão de vezes
- Tempo de resposta: menos de 10 ms
- Tempo de recuperação: menos de 15 ms
- Temperatura de trabalho:- 20℃~ 60℃
- IME: não
- ESD: não sensível
- Peso: 3g
Projeto(s) relacionado(s)
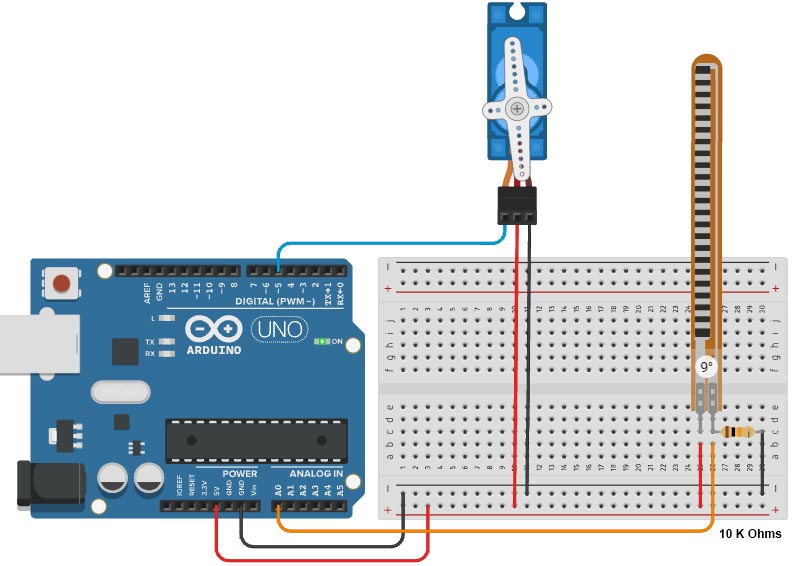
Exoesqueleto para amplificar a força da mão ou dos dedosO projeto usa Arduino Uno R3, Sensor Flexível de Força/Resistência e resistor de 10 kΩ para controle de um servo motor. A ideia é captar movimentos mínimos produzidos pela mão humana ou parte dela para amplificar a força dos dedos. Pode também funcionar como uma prótese ortopédica para as pessoas que possuem apenas parte dos dedos. Este dispositivo também pode complementar o trabalho do fisioterapeuta nos processos de recuperação de movimentos dos dedos.
.
// Projeto: Controla servo motor com sensor de flexão // Autor: André Silveira // Data: 28/09/2021 #include "Servo.h" int Valor = 0; int Angulo = 0; int PinoServo = 5; int Pino_sensor = A0; Servo MeuServo; // Criar um Objeto Servo void setup() { pinMode(Pino_sensor,INPUT); MeuServo.attach(PinoServo); // Inicializa Servo Motor Serial.begin(9600); } void loop() { Valor = analogRead(Pino_sensor); Angulo = map(Valor, 0, 180, 360, 0); MeuServo.write(Angulo); Serial.print("Valor: "); Serial.print(Valor); Serial.print(" - Angulo: "); Serial.println(Angulo); // Imprime tudo que foi setado acima delay(50); }
|
[Voltar] |
[Avançar] |