Arduino, Internet das Coisas e Computação vestível
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
|
[Voltar] |
[Avançar] |
Servo Motor Digital Mg996R
Descrição
É motor eletrônico desenvolvido para aplicação em projetos robóticos. Possui grande precisão e destaca-se pela sua capacidade de propiciar rotações de 45°, 90°, 180°, 270° ou 360° com torque máximo de 11 kgf/cm em 6V. O sistema de transmissão é composto por engrenagens metálicas, o que garante maior durabilidade, segurança e força. Acompanha um kit com diversos acessórios, onde com eles é possível utilizar o servo motor para os mais diversos fins.
Especificações
- Modelo: MG996R.
- Torque: 9,4kgf/cm em 4.8V e 11kgf/cm em 6.0V.
- Posição: 45°, 90°, 180°, 270° ou 360°
- Velocidade de operação: 60/0.17 graus/segundo - 4.8V sem carga.
- Velocidade de operação: 60/0.13 graus/segundo - 6.0V sem carga.
- Comprimento do fio conector: 28cm.
- Dimensões (CxLxA): 55x20x45mm.
- Peso: 57g.
- Peso com embalagem: 65g.
Biblioteca
Baixe a biblioteca: https://github.com/arduino-libraries/Servo
Projeto(s) relacionado(s)
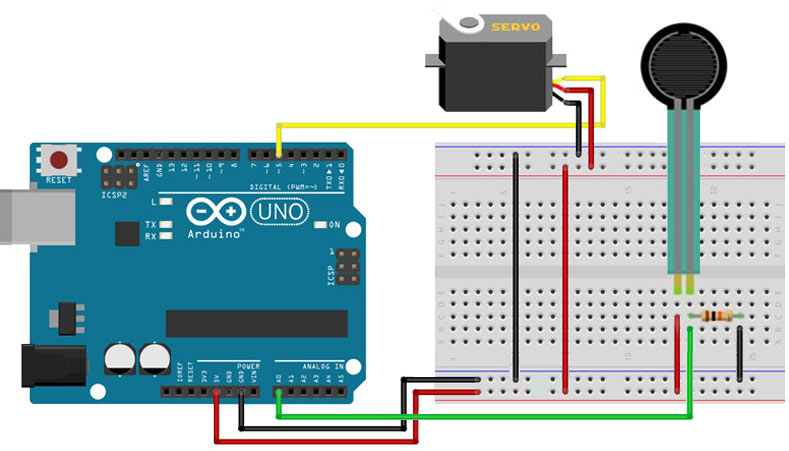
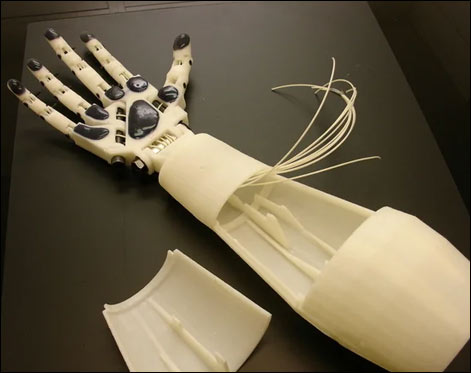
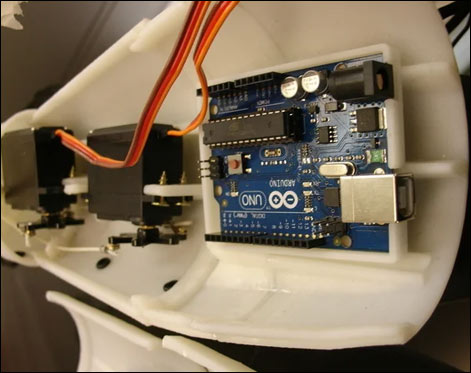
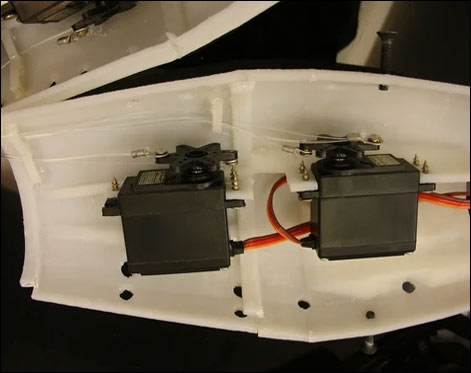
Hand robot InMoovProjeto de uma mão robótica biônica que utiliza Arduino Uno R3, Servo motores e Sensor de força resistivo para dirigir e controlar cada dedo separadamente. Ele foi desenvolvido em 2012 pelo escultor e designer francês Gael Langevin. Saiba mais em: O modelo para impressão 3D é disponibilizado em: https://www.thingiverse.com/thing:17773/files. A "Hand robot InMoov" é um subprojeto do "Robot InMoov", primeiro robô em tamanho real impresso em 3D de código aberto. Ele pode ser replicável em qualquer impressora 3D com uma área de 12 x 12 x 12 cm. Foi criado como uma plataforma de desenvolvimento para Universidades, Laboratórios e Hobistas. Saiba mais sobre "Hand robot InMoov" em: http://inmoov.fr/
// Projeto: Hand robot InMoov - movimenta um dedo da mão #include "Servo.h" const int Pino_Servo1 = 5; const int Pino_Resistivo1 = A0; int Leitura_Resistivo1; int Posicao_Servo1; Servo Meu_Servo1; void setup () { Serial.begin (57600); Meu_Servo1.write (30); // Mão fechada. Posicao_Servo1 = 30; Meu_Servo1.attach (Pino_Servo1); } void loop () { Leitura_Resistivo1 = analogRead (Pino_Resistivo1); Serial.print ("Analog reading = "); Serial.print (Leitura_Resistivo1); // Leitura bruta // --------- limites estabelecidos da leitura -------- // if (Leitura_Resistivo1 < 25) { Serial.println (" - Sem pressao"); } else if (Leitura_Resistivo1 < 30) { Serial.println (" - Toque leve"); } else if (Leitura_Resistivo1 < 50) { Serial.println (" - Aperto leve"); } else if (Leitura_Resistivo1 < 110) { Serial.println (" - Aperto médio"); } else if (Leitura_Resistivo1 < 200) { Serial.println (" - Aperto forte"); } delay (1000); AbreMao (Posicao_Servo1, 1); delay (3000); FechaMao (Posicao_Servo1, 1); delay (3000); } void AbreMao (int posicao, int servo) { for (; posicao < 130; posicao ++) { Meu_Servo1.write (posicao); if (analogRead (Pino_Resistivo1) > 30) { break; } } } void FechaMao () { Meu_Servo1.write (30); posicao = 30; }
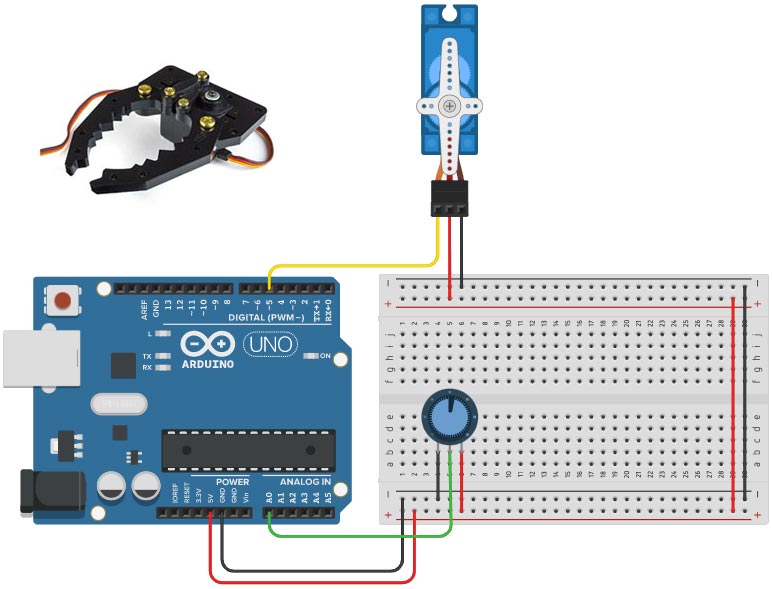
Garra controlada por potenciômetroO projeto usa Micro Servo motor SG90, placa Arduino Uno R, potenciômetro e jumpers para controlar uma garra.
// Projeto: Garra controlada por potenciômetro // Autor: André Silveira // Data: 07/07/2019 #include "Servo.h" Servo MeuServo; // Criar um Objeto Servo int PinoPoten = A0; // Pino de conexão do potenciômetro int PinoServo = 5; // Pino de conexão do potenciômetro int angulo = 0; void setup(){ MeuServo.attach(PinoServo); // Inicializa Servo Motor pinMode(PinoPoten,INPUT); // Inicializa potenciômetro } void loop(){ angulo = analogRead(PinoPoten); // Lê o valor do Potenciometro angulo = map(angulo, 0, 1023, 0, 180); // Mapeia o valor de 0 a 180 graus MeuServo.write(angulo); // Repassa o angulo ao ServoWrite delay(15); // Delay de 15ms para o Servo alcançar a posição }
Controlando Micro Servo SG90 com JoystickO projeto usa Arduino Uno R3, Micro Servo motor SG90 e Módulo Joystick KY-023.
// Projeto: Controlando Micro Servo SG90 com Joystick // Autor: André Silveira // Data: 07/07/2019 #include "VarSpeedServo.h" VarSpeedServo Servo01; // Cria objeto para controlar o servo 1 VarSpeedServo Servo02; // Cria objeto para controlar o servo 2 int pino_x = A4; // Pino ligado ao X do joystick int pino_y = A5; // Pino ligado ao Y do joystick int val_x; // Armazena valor do eixo X int val_y; // Armazena valor do eixo Y void setup(){ Servo01.attach(6, 1, 180); // Define porta a ser ligada ao servo 1 Servo02.attach(7, 1, 180); // Define porta a ser ligada ao servo 2 } void loop() { val_x = analogRead(pino_x); // Lê valor do eixo x do joystick val_x = map(val_x, 0, 1023, 1, 180); // Converte valor lido para um valor entre 1 e 180 graus Servo01.slowmove(val_x, 60); // Move servo base para a posicao val_y = analogRead(pino_y); // Lê valor do eixo y do joystick val_y = map(val_y, 0, 1023, 1, 180); // Converte valor lido para um valor entre 1 e 180 graus Servo02.slowmove(val_y, 60); // Move servo base para a posicao delay(30); // Aguarda movimentação do servo }


|
[Voltar] |
[Avançar] |