Arduino, Internet das Coisas e Computação vestível
Você está em »
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
|
[Voltar] |
[Avançar] |
Micro Servo SG90
Descrição
É um motor muito utilizado em aplicações para robótica. Ele apresenta movimentos proporcionais aos comandos indicados, controlando o giro e a posição, diferente da maioria dos motores. É um motor compacto, pesa apenas 9g e oferece um torque máximo de ~1.6kg. Acompanha ainda dois parafusos para fixação do servo, três cruzetas e um parafuso para fixação das cruzetas. Para sua alimentação possuem três fios de inteface, ao qual, dois servem para alimentação e o outro para recebimento de sinais do controle.
Especificações
- Modelo: SG90.
- Torque: 1,2 Kg/cm (4,8V) e 1,6 Kg/cm (6V)
- Posição: 45°, 90°, 180°, 270° ou 360°
- Tipo de engrenagens: Nylon.
- Voltagem: 3,0 ~6,0 Volts.
- Temperatura de trabalho: -30ºC ~ +60ºC
- Tamanho do fio: 24cm
- Dimensões totais (CxLxA): 22,7x12,6x29,8mm.
- Peso: 11g.
Bibliotecas
- Servo.h: para controlar motor
Saiba mais em: https://www.arduino.cc/en/reference/servo- VarSpeedServo.h: para controlar motores
Saiba mais em: https://forum.arduino.cc/index.php?topic=61586.0
Projeto(s) relacionado(s)
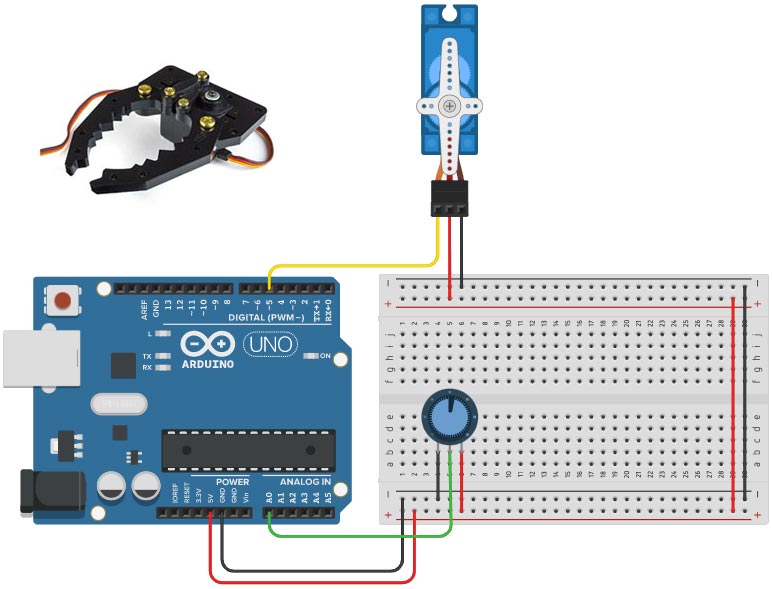
Garra controlada por potenciômetroO projeto usa Micro Servo motor SG90, placa Arduino Uno R, potenciômetro e jumpers para controlar uma garra.
// Projeto: Garra controlada por potenciômetro // Autor: André Silveira // Data: 07/07/2019 #include "Servo.h" Servo MeuServo; // Criar um Objeto Servo int PinoPoten = A0; // Pino de conexão do potenciômetro int PinoServo = 5; // Pino de conexão do potenciômetro int angulo = 0; void setup(){ MeuServo.attach(PinoServo); // Inicializa Servo Motor pinMode(PinoPoten,INPUT); // Inicializa potenciômetro } void loop(){ angulo = analogRead(PinoPoten); // Lê o valor do Potenciometro angulo = map(angulo, 0, 1023, 0, 180); // Mapeia o valor de 0 a 180 graus MeuServo.write(angulo); // Repassa o angulo ao ServoWrite delay(15); // Delay de 15ms para o Servo alcançar a posição }
Controlando Micro Servo SG90 com JoystickO projeto usa Arduino Uno R3, Micro Servo motor SG90 e Módulo Joystick KY-023.
// Projeto: Controlando Micro Servo SG90 com Joystick // Autor: André Silveira // Data: 07/07/2019 #include "VarSpeedServo.h" VarSpeedServo Servo01; // Cria objeto para controlar o servo 1 VarSpeedServo Servo02; // Cria objeto para controlar o servo 2 int pino_x = A4; // Pino ligado ao X do joystick int pino_y = A5; // Pino ligado ao Y do joystick int val_x; // Armazena valor do eixo X int val_y; // Armazena valor do eixo Y void setup(){ Servo01.attach(6, 1, 180); // Define porta a ser ligada ao servo 1 Servo02.attach(7, 1, 180); // Define porta a ser ligada ao servo 2 } void loop() { val_x = analogRead(pino_x); // Lê valor do eixo x do joystick val_x = map(val_x, 0, 1023, 1, 180); // Converte valor lido para um valor entre 1 e 180 graus Servo01.slowmove(val_x, 60); // Move servo base para a posicao val_y = analogRead(pino_y); // Lê valor do eixo y do joystick val_y = map(val_y, 0, 1023, 1, 180); // Converte valor lido para um valor entre 1 e 180 graus Servo02.slowmove(val_y, 60); // Move servo base para a posicao delay(30); // Aguarda movimentação do servo }

|
[Voltar] |
[Avançar] |