Arduino, Internet das Coisas e Computação vestível
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
|
[Voltar] |
[Avançar] |
Motor de Passo 28BYJ-48 + Driver ULN2003
Descrição
O Motor de Passo é ideal para projetos de robótica que necessitem de movimento precisos e controle da posição do eixo do motor. Ele desloca seu eixo em um determinado ângulo a cada pulso. Esse ângulo varia de acordo com o número de passos por volta que o motor possui. O Motor 28BYJ-48 opera em 5V, possui ângulo de 5,625º de giro e necessita de 64 passos para realizar uma volta completa. É do tipo unipolar, possui 5 fios, dentre eles 4 fases e um fio de derivação central. Para realizar o controle do motor é necessário uso de Drive ULN2003, que nada mais é do que um conversor de sinais de comando para sinais de potência, necessários para funcionamento do motor.
Especificações
- Tensão: 5V
- Número de Fases: 4
- Redução interna: 64:1
- Ângulo do passo: 5,625º/64
- Frequência: 100Hz
- Resistência DC: 50Ω±7%(25℃)
- Torque nominal: 0,34kgf.cm.
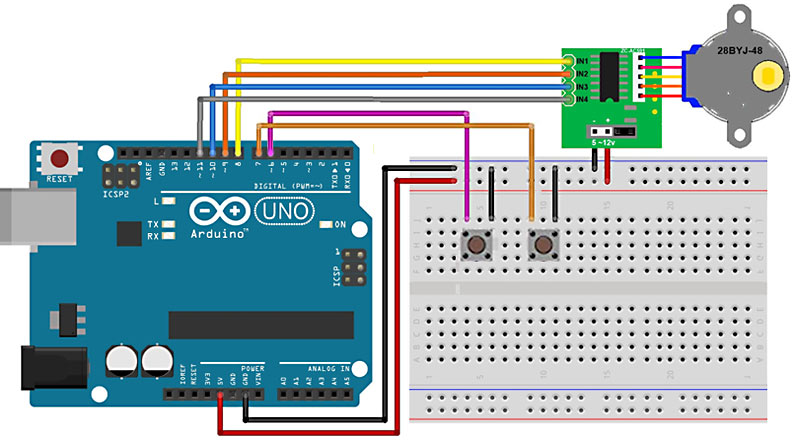
Montagem com 1 Motor de Passo e Driver ULN2003

Biblioteca
Baixe a biblioteca: https://github.com/arduino-libraries/Stepper
Projeto(s) relacionado(s)
Controle de giro de motor de passo com botõesO projeto usa Chave Táctil ou Push Button, placa Arduino Uno R3, Motor de Passo 28BYJ-48 + Driver ULN2003 e jumpers para controlar o giro de um motor.
// Projeto: Controle de giro de motor de passo com botões // Autor: André Silveira // Data: 12/05/2019 #include "Stepper.h" // declaração biblioteca Motor de passo int PassosPorVolta = 100; // Passos para dar uma volta int Pino_botao1 = 6; // pino do primeiro botão int Pino_botao2 = 7; // pino do segundo botão Stepper MotorStepper(PassosPorVolta, 8, 10, 9, 11); // Instância motor e pinos de comando void setup() { pinMode(Pino_botao1,INPUT_PULLUP); pinMode(Pino_botao2,INPUT_PULLUP); MotorStepper.setSpeed(300); // Configura a velocidade por rpm: } void loop(){ if (digitalRead(Pino_botao1) == LOW ) { // Verifica se botão 1 foi pressionado MotorStepper.step(-PassosPorVolta); // Gira motor no sentido anti horário } if (digitalRead(Pino_botao2) == LOW) { // Verifica se botão 2 foi pressionado MotorStepper.step(PassosPorVolta); // Gira motor no sentido horário } }
Mini Plotter
Projeto de mini plotter de impressão por caneta criado por André Luis Marques da Silveira. Materiais utilizados: Arduino Uno, Motor Shield L293D, 2 Motores de passos 5V 28BYJ, 1 Servo Motor 9G SG90, 8 Polias plásticas de varal de roupa, 14 Parafusos, 1 Rolo de barbante, 1 Espeto de churrasco, 1 Peça de MDF - 0,5x60x80cm, 1 Tubo de cola 100 g, 1 Lixa de madeira, 1 Lata de Spray preto e 2 Atílios.
|
[Voltar] |
[Avançar] |