Arduino, Internet das Coisas e Computação vestível
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
|
[Voltar] |
[Avançar] |
8.4. Aciona motor com transistor TIP 120
Acionando um motor com transistor TIP 120 e arduino
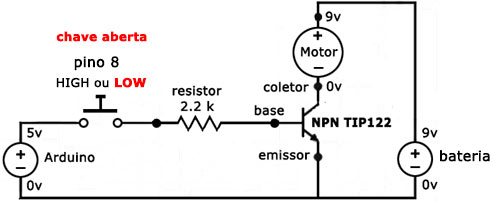
No circuíto abaixo, um transistor NPN TIP120 controla um motor de corrente continua (CC ou DC) que necessita mais corrente do que os pinos do arduino podem fornecer. O transistor funciona como uma chave que liga ou desliga a corrente gerada por uma pilha de 9 Volts.
No circuito, o pino digital 8 do arduino está conectado a base (B) do transistor. Através dele controlamos o fluxo de corrente do coletor para o emissor, permitindo que se ligue ou desligue o motor. O negativo do motor (GND) está conectado ao emissor (E) e o positivo ao polo positivo da bateria externa. O negativo da bateria (GND) está conectado ao coletor do transistor (C).
Perceba que o Ground da pilha está ligado ao Ground do Arduino. Isso serve para dar um ponto de referência para os elétrons poderem seguir, se VC retirar o Ground da pilha o motor para de girar, ou seja, os elétrons perdem a referência.
Na programação abaixo, ao mandarmos um sinal alto (HIGH - 5V) na porta digital 8 o transistor dará um curto (motor funcionará). Ao mandarmos um sinal baixo (LOW - OV) o transistor desfaz o curto (motor desligará). Agora temos o 5V do arduino controlando o transistor (fazendo ele funcionar como liga e desliga) e 9V da pilha suprindo o motor.
A tensão máxima aceita pelo TIP120 na base é de 5 Volts. Nesta versão utilizamos um resistor de 3 KΩ para alimentar a base com 1,45 Volts.
O programa inicia ligando o motor durante 5 segundo.
Após, o motor é desliga por mais 5 segundos.
Em seguida, o processo é reiniciado.
// Projeto: Liga e Desliga Motor DC // Autor: André Silveira // Data: 07/05/2018 int base = 8; // Variável base - Pino digital 8 |
|
[Voltar] |
[Avançar] |