Arduino, Internet das Coisas e Computação vestível
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
» | ||
|
[Voltar] |
[Avançar] |
Módulo Acelerômetro e Giroscópio MPU-6050 - GY521
Descrição
O Acelerômetro e Giroscópio MPU-6050 3 Eixos apresenta dois recursos em uma única placa, destacando-se ainda a presença do recurso DMP, o qual é responsável pela realização dos cálculos de alta complexidade. Para maior praticidade, encontra-se embutido junto ao Acelerômetro e Giroscópio MPU-6050 3 Eixos um sensor de temperatura que trabalha com medições entre -40 a 85°C. Conforme anteriormente mencionado o Acelerômetro e Giroscópio MPU-6050 conta com 3 Eixos (X,Y,Z) para o acelerômetro e outros 3 eixos para o giroscópio, apresentando resultados satisfatórios e excelente grau de precisão.
Caracteristicas
- Acelerômetro e Giroscópio MPU-6050
- Dois módulos em uma única placa
- 3 Eixos 6 DOF
- Alta precisão
- Conversor analógico digital de 16-bits para cada canal
- Captura simultaneamente X, Y e Z
- Sensor de temperatura embutido
Especificações
- Modelo: GY-521
- Chip: MPU-6050
- Tensão de Operação: 3 - 5V
- Conversor AD: 16 bits
- Comunicação: I2C
- Faixa do Giroscópio: ±250, 500, 1000, 2000°/s;
- Faixa do Acelerômetro: ±2, ±4, ±8, ±16g;
- Faixa do Sensor de Temperatura: -40 a 85°C
- Dimensões (CxLxE): 21x17x3mm
- Peso: 1,2g
Pinagem:
- Vcc: Alimentação (3,3V à 5V);
- GND: 0V;
- SCL: I2C Serial Clock (SCL);
- SDA (Slave_Data): I2C Serial Data (SDA);
- XDA: I2C Master Serial Data, para conexão de sensor auxiliar;
- XCL: I2C Master Serial Clock, para conexão de sensor auxiliar;
- AD0: Define o endereço da I2C;
- INT: pino para interrupção.
Como funciona
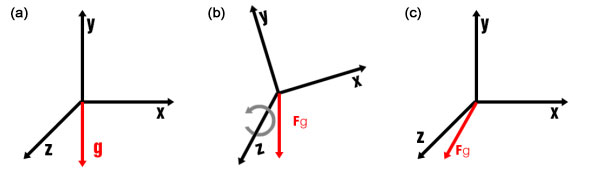
O acelerômetro: força da gravidade (Inclinação e movimento)O sensor mede a aceleração através da força de gravidade a que o sensor está sujeito em cada um dos três eixos. Ele mede a inclinação e o movimento. É capaz de detectar o movimento de rotação e gestos tais como balançar ou agitar um objeto do qual ele faz parte. O gráfico (a) representa uma situação em que o acelerômetro se encontra em repouso, pousado numa superfície plana, os valores comunicados pelos sensor serão x= 0, y=0 e z=-1. O gráfico (b) representa a rotação do eixo X para baixo, o valores comunicados pelo sensores serão x=1, y=0 e z=0.
O giroscópio: força da gravidade (Direção do movimento)
O sensor permite entender o posicionamento espacial através da força de gravidade. Quando um objeto está em movimento, os sensores de eixo do giroscópio conseguem informar exatamente para qual direção o produto está se movendo. Numa aeronave sua utilidade é ainda maior, uma vez que consegue determinar se o aparelho está apontado para cima ou para baixo. Ou seja, é muito empregado em sistema que necessitam interpretar os movimentos do utilizador.
Bilioteca:
Para programar o Módulo Acelerômetro e Giroscópio MPU-6050 utilize a biblioteca abaixo:
Projeto(s) relacionado(s)
Projeto acelerômetro e giroscópioO projeto utiliza um Arduino Uno R3, Display Oled 0,96 128x64 e Módulo Acelerômetro e Giroscópio MPU-6050 para informar valores referentes a posição espacial do sensor. Este é um bom exemplo de como usar conjuntamente a tela OLED 128x64 "I2C" no endereço "0x3C" e o Giroscópio MPU-6050 "I2C" no endereço "0x68". O I2C é um protocolo de comunicação que visa conectar diversos dispositivos (periféricos) utilizando as linhas de dados Serial Data (SDA) e Serial Clock (SCL) . A ideia é definir um endereço hexadecimal para cada dispositivo conectado e no momento de comunicação somente o dispositivo solicitado responderá.
// Projeto: acelerômetro e giroscópio // Autor: André Silveira // Data: 14/06/2019 #include "Adafruit_GFX.h" // Biblioteca para processamento gráfico #include "Adafruit_SSD1306.h" // Biblioteca do controlador SSD1306 #include "GY6050.h" // Biblioteca do Acelerometro e Giroscópio /* --- Variaveis globais --- */ float acelX, acelY, acelZ; float giroX, giroY, giroZ; float tempCelsius, tempFarenheit; char string[10]; GY6050 gyro(0x68); // Cria um objeto gyro com endereço I2C "0x68" Adafruit_SSD1306 display(128, 64); // Cria objeto display void setup() { delay(100); display.begin(SSD1306_SWITCHCAPVCC, 0x3C); // Inicializa a tela com endereço I2C "0x3C" display.clearDisplay(); // Limpa a tela display.setTextColor(WHITE); // Define cor do texto display.setRotation(0); // Configura orientação 0, 1, 2 ou 3 display.setTextWrap(false); display.setTextSize(1); // Define tamanho da fonte do texto display.dim(0); // Define brilho (0 é máximo) gyro.initialisation(); // Inicializa giroscópio } void loop() { /* --- Obtem dados do sensor --- */ acelX = gyro.refresh('A', 'X'); // Obtém o eixo "X" do Acelerometro acelY = gyro.refresh('A', 'Y'); // Obtém o eixo "Y" do Acelerometro acelZ = gyro.refresh('A', 'Z'); // Obtém o eixo "Z" do Acelerometro tempCelsius = gyro.refresh('T', 'C'); // Obtém a temperatura em Graus Celsius tempFarenheit = gyro.refresh('T', 'F'); // Obtém a temperatura em Farenheit giroX = gyro.refresh('G', 'X'); // Obtém o eixo "X" do Giroscópio giroY = gyro.refresh('G', 'Y'); // Obtém o eixo "Y" do Giroscópio giroZ = gyro.refresh('G', 'Z'); // Obtém o eixo "Z" do Giroscópio /* --- Desenha dados na tela do acelerometro --- */ display.clearDisplay(); display.drawRoundRect(20,0,40,54,4, WHITE); display.drawLine(20,16,60,16, WHITE); display.setCursor(28,6); display.println("Acel"); display.setCursor(32,22); dtostrf(acelX, 3, 0, string); display.println(string); display.setCursor(32,32); dtostrf(acelY, 3, 0, string); display.println(string); display.setCursor(32,42); dtostrf(acelZ, 3, 0, string); display.println(string); /* --- Desenha dados na tela do giroscópio --- */ display.drawRoundRect(64,0,40,54,4, WHITE); display.drawLine(64,16,104,16, WHITE); display.setCursor(72,6); display.println("Gyro"); display.setCursor(76,22); dtostrf(giroX, 3, 0, string); display.println(string); display.setCursor(76,32); dtostrf(giroY, 3, 0, string); display.println(string); display.setCursor(76,42); dtostrf(giroZ, 3, 0, string); display.println(string); display.display(); delay(1500); }
Mini balancing robo
O robô auto-equilibrante que usa dois motores passos (NEMA14), Arduino Pro Mini, drivers de passo A4988, um modulo de giroscópio MPU-6050, dentre outras peças. A estrutura física do robô é composta por peças plásticas impressas em 3D.

|
[Voltar] |
[Avançar] |